With the increasing presence of social robots in
various environments and applications, there is an increasing
need for these robots to exhibit socially-compliant behaviors.
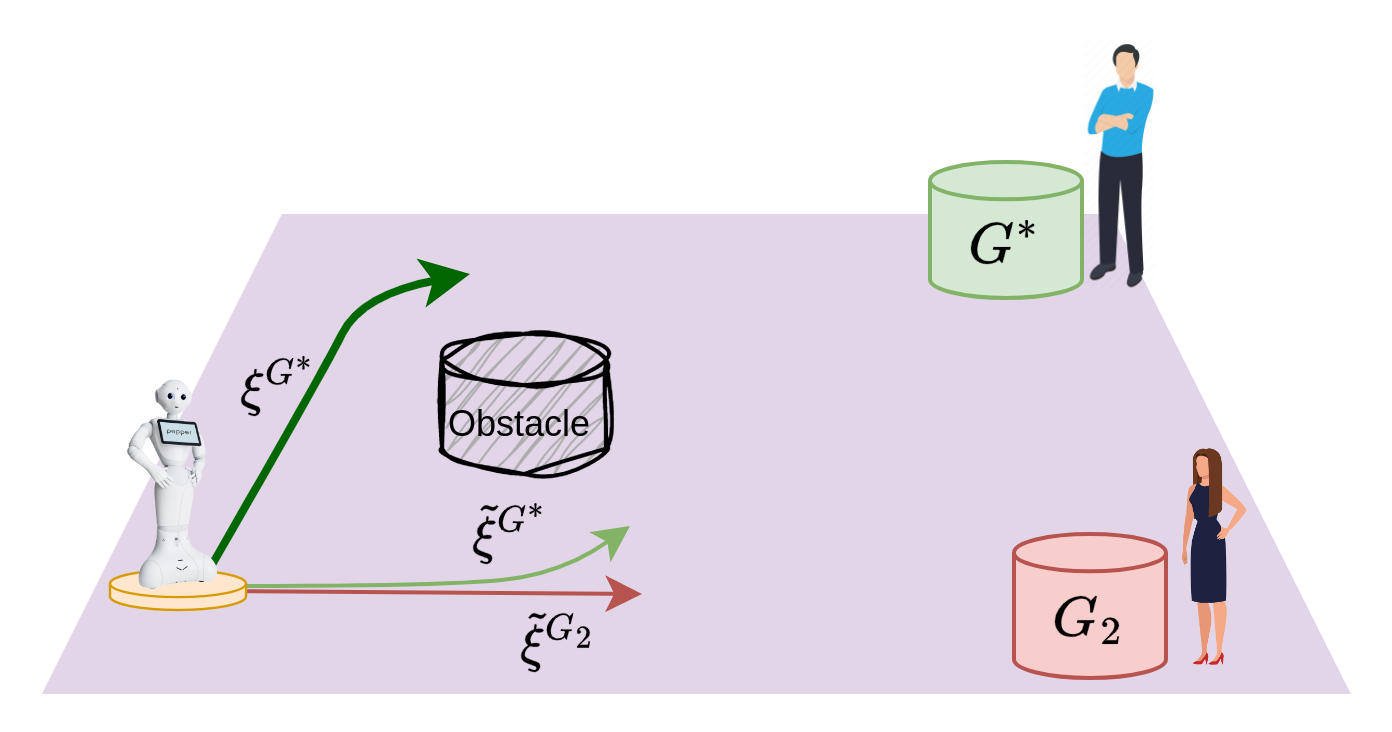
Legible motion, characterized by the ability of a robot to clearly
and quickly convey intentions and goals to the individuals in
its vicinity, through its motion, holds significant importance
in this context. This will improve the overall user experience
and acceptance of robots in human environments. In this
paper, we introduce a novel approach to incorporate legibility
into local motion planning for mobile robots. This can enable
robots to generate legible motions in real-time and dynamic
environments. To demonstrate the effectiveness of our proposed
methodology, we also provide a robotic stack designed for
deploying legibility-aware motion planning in a social robot,
by integrating perception and localization components.